Next: Model AR
Up: Klasyczna analiza sygnałów
Previous: Twierdzenie o próbkowaniu
Spis tresci
Skorowidz
Systemy liniowe niezmiennicze w czasie dają się opisać z pomocą
liniowych równań różnicowych o stałych współczynnikach:
![$\displaystyle \sum_{k=0}^K a_k y[n-k] = \sum_{l=0}^L b_l x[n-l]$](img259.png) |
(2.32) |
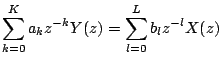
Zastosujmy do obu stron równania 2.32 przekształcenie  (patrz dodatek A.3)
(patrz dodatek A.3)
 |
(2.33) |
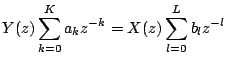
lub
 |
(2.34) |
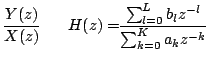
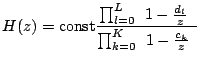
 -- funkcja systemu (system function).
-- funkcja systemu (system function).
Piotr J. Durka
2004-01-05
![$\displaystyle Z\left\{\sum_{k=0}^K a_k y[n-k] \right\} = Z\left\{ \sum_{l=0}^L b_l x[n-l] \right\}$](img260.png)
![$\displaystyle \sum_{k=0}^K a_k Z\left\{ y[n-k]\right\} = \sum_{l=0}^L b_l Z \left\{x[n-l]\right\}$](img261.png)